This project is in the proposal/proof-of-concept stage in my lab. Our goal is to improve the human experience in collaborative/close-proximity tasks by using a human-aware motion planner.
My approach to this is two-fold:
- Generate a PRM, augmented with information to make human-aware calculations cheaper, such as:
- Collision probabilities
- Values needed for kinematic and dynamic calculations
- Find paths in the graph, using a modified A* search, but calculating human-aware costs, such as:
- Probability of collision
- Proximity to human
- Rapid motions towards human
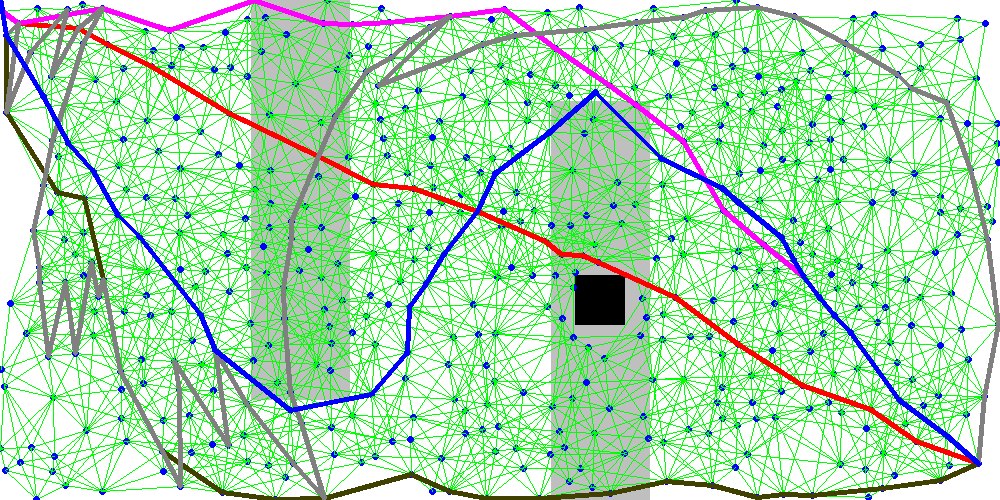
Demonstration PRM
As the initial proof-of-concept (and easy-to-debug example), I’ve created a 2D world, with:
- An obstacle (black square)
- high-probability collision regions (grey)
There are several attempts at planing from the upper-left to lower-right corners:
- Red: standard A*
- Pink: cost for being above the downward diagonal (right-shifted)
- Brown: cost for being high up in the world
- Grey: cost for moving directly towards the black object
- Blue: cost for moving into high-probability-collision nodes (only planner with this knowledge)
Upcoming Work
- Extension to robot arm planning
- Improvements to PRM generation
- Investigating properly adapting A* search to these additional costs